InfiniBand Network
RoCE Network
Comprehensive AI Network Architecture
Immersion Cooling Network
Let's Chat
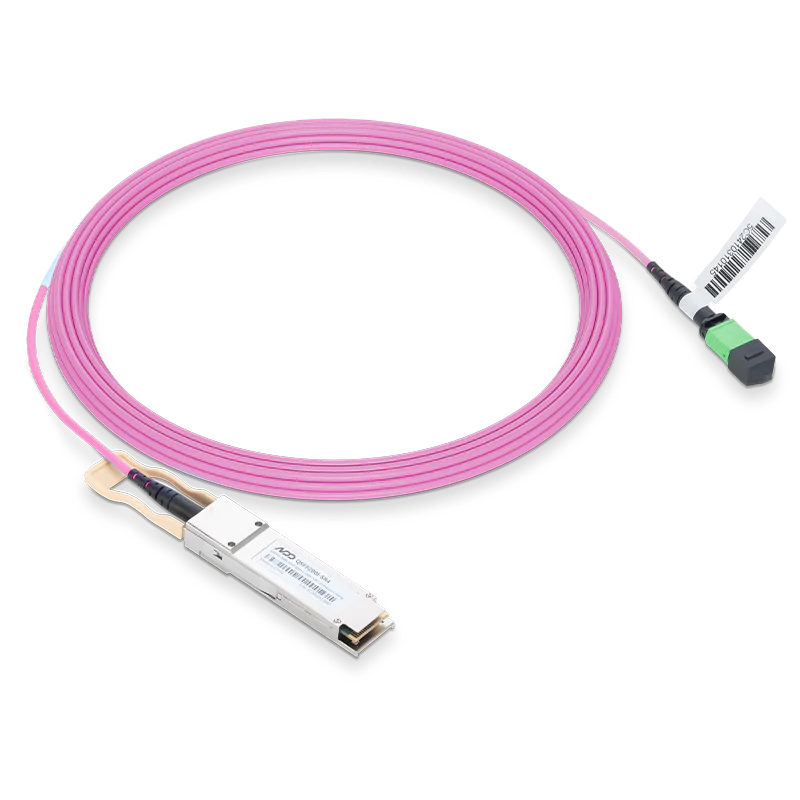
NVIDIA/Mellanox MFS1S00-H003E/MFS1S00-H003V/MFS1S00-H003-LL Compatible AOC 3m (10ft) 200Gb/s QSFP56 InfiniBand HDR LSZH Active Fiber Cable (850nm , MMF)
US$ 473.00
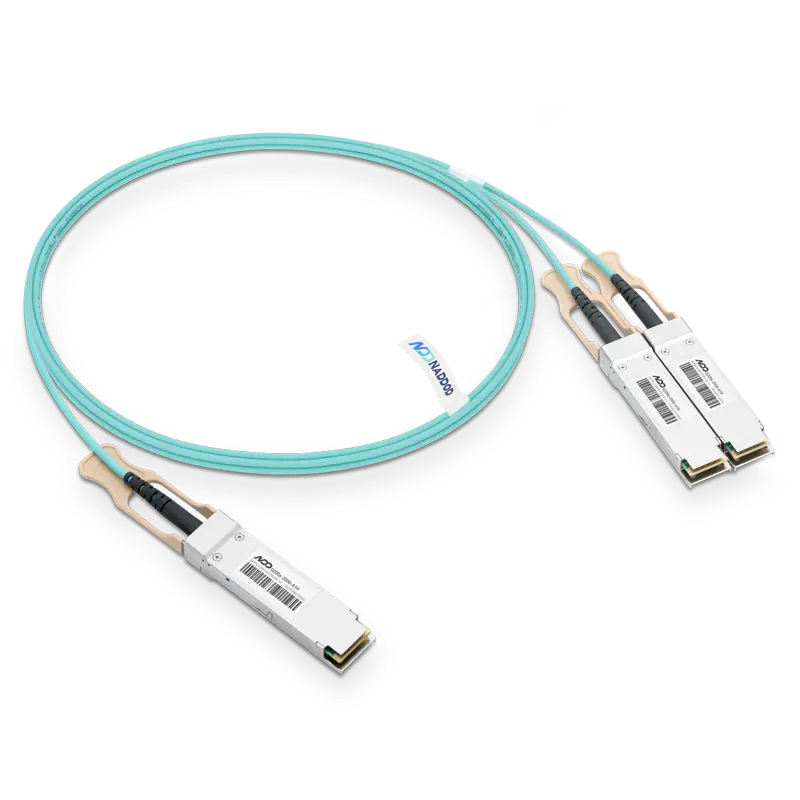
NVIDIA/Mellanox MFS1S50-H001E/MFS1S50-H001V Compatible AOC 1m (3ft) InfiniBand HDR 200Gb/s to 2x100Gb/s QSFP56 to 2xQSFP56 Active Optical Splitter Cable (850nm, MMF, LSZH)
US$ 641.00
NVIDIA/Mellanox MCP7H50-H001R30 Compatible DAC 1m (3ft) InfiniBand HDR 200Gb/s to 2x100Gb/s QSFP56 to 2xQSFP56 Passive Copper (Hybrid) Cable (Passive Twinax, PVC)
US$ 92.00
NVIDIA/Mellanox MCP1650-H001E30 Compatible DAC 1m (3ft) 200Gb/s QSFP56 to QSFP56 InfiniBand HDR Passive Direct Attach Copper Twinax Cable
US$ 68.00
NVIDIA/Mellanox MMA1T00-HS Compatible 200G SR4 QSFP56 PAM4 850nm 100m DOM MTP/MPO-12 UPC InfiniBand HDR Transceiver Module for MMF
US$ 243.00
NVIDIA/Mellanox MMS1W50-HM Compatible 200GBASE-FR4 QSFP56 PAM4 1310nm 2km DOM LC Duplex InfiniBand HDR Transceiver Module for SMF
US$ 999.00

































 800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module
800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module



 800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module
800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module