InfiniBand Network
RoCE Network
Comprehensive AI Network Architecture
Immersion Cooling Network
Let's Chat
NVIDIA/Mellanox MCA4J80-N003 Compatible ACC 3m (10ft) Twin-port 2x400Gb/s OSFP Finned Top to 2x400Gb/s OSFP Finned Top InfiniBand NDR Active Copper Cable
US$ 689.00
NVIDIA/Mellanox MCA7J60-N004 Compatible ACC 4m (13ft) Twin-port 2x400Gb/s OSFP Finned Top to 2x400Gb/s OSFP Flat Top InfiniBand NDR Active Copper Splitter Cable
US$ 1,111.00
NVIDIA/Mellanox MMA4Z00-NS Coherent VCSEL & Broadcom DSP Compatible 800G 2xSR4/SR8 OSFP PAM4 850nm 50m DOM Two MPO-12/APC InfiniBand NDR Transceiver Module for MMF (Finned Top)
US$ 779.00
Juniper QDD-400G-SR8 Compatible 400GBASE-SR8 QSFP-DD PAM4 850nm 100m MTP/MPO FEC Optical Transceiver Module
US$ 210.00
Cisco QDD-400G-FR4-S Compatible 400GBASE-FR4 QSFP-DD PAM4 1310nm 2km DDM/DOM Duplex LC SMF Optical Transceiver Module
US$ 710.00
Cisco QDD-400G-DR4-S Compatible 400GBASE-DR4 QSFP-DD PAM4 1310nm 500m FEC MTP/MPO-12 APC SMF Optical Transceiver Module
US$ 539.00
Cisco QDD-400G-LR4-S Compatible 400GBASE-LR4 QSFP-DD PAM4 CWDM4 Duplex LC 10km SMF FEC Optical Transceiver Module
US$ 985.00


































 800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module
800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module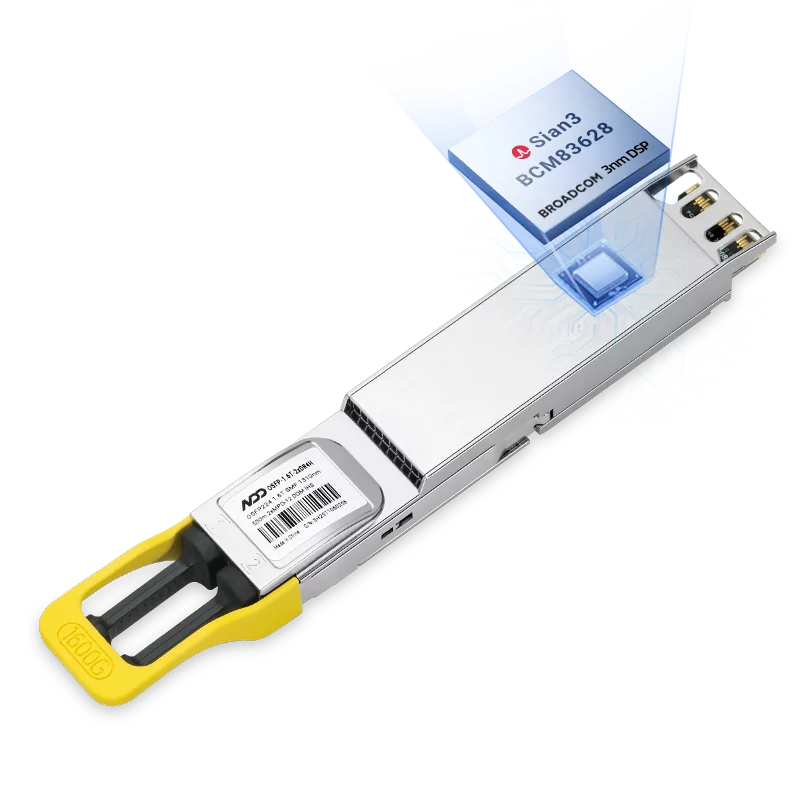



 800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module
800GBASE-2xSR4 OSFP PAM4 850nm 50m MMF Module





